Bases
Objectifs du compactage
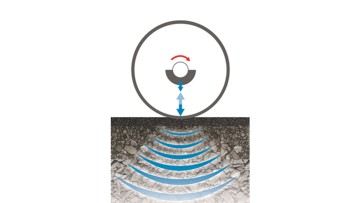
Types de compactage

Compactage statique
Lors du compactage statique, la charge appliquée par le compacteur produit une contrainte de cisaillement dans la couche à compacter. Il n’est cependant possible d’effectuer le compactage que si la contrainte de cisaillement se rapproche suffisamment de la résistance au cisaillement de l’enrobé, c’est-à-dire à chaque fois que des déformations plastiques se produisent. L’enrobé se déplace et se positionne de manière plus compacte. La teneur en vides est réduite et la stabilité augmentée.